







Allgemein
Die Digitalanzeige basiert auf einem recht günstig bei Ebay zu bekommenden Handydisplay für das Siemens S65.
Achtung, es gibt mehrere Varianten mit fester und flexibler Leiterplatte. Die Software funktioniert aktuell nur mit dem LPH8836-2 Display, dem mit fester grüner Leiterplatte. Die Wahl viel auf dieses, da man dort recht einfach ein paar Drähte zur Kontaktierung anlöten kann.
Das Display hat eine Auflösung von 132x176 Bildpunkten bei 65k Farbtiefe. Es ist sehr kontrastreich und gut ablesbar.
Herzstück der Digitalanzeige ist ein PIC18LF4620. Dieser kümmert sich um die Abfrage der Sensoren und die Darstellung der Messwerte auf dem Display.
Für die Bedienung sind einmal drei Funktionstasten vorgesehen, deren aktuelle Funktion unten im Display angezeigt wird. Hauptsächlich sollen Sie zum Nullen der Achsen dienen. Die Position des Nullpunktes von der aktuellen kann dabei frei eingestellt werden.
Ein Rotary Encoder mit Taster wird verwendet um Sonderfunktionen und die Parametrierung aufzurufen.
Die Sensoren werden über einen RS485 Bus angesteuert. Zur Versorgung sind mit 12V Gleichspannung notwendig.

Prototyp der Digitalanzeige

Platine von oben
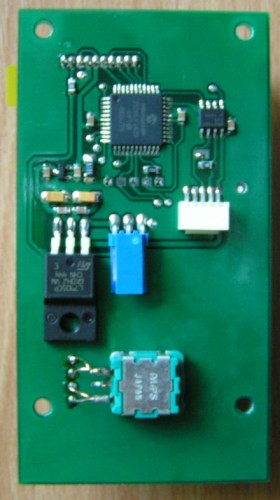
Platine von unten
Auf der Oberseite der Platine sind das Display und die Taster montiert. Diese werden dann über Distanzscheiben durch die Folie hindurch bedient.
Der Rotary Encoder wird von der Unterseite durch die Platine gesteckt und mit dieser verschraubt. Die Verkabelung sieht zwar nicht gerade professionell aus aber so spart man einiges an Bauhöhe.
Der Großteil der Schaltung ist auf der Unterseite untergebracht. SMD Technik hat hier den großen Vorteil, dass das Display direkt darüber auf der Leiterplatte montiert werden kann.
Beim Display werden einfach ein paar kurze Kupferdrahtstücke auf die Kontakte gelötet und dann durch die dafür vorgesehenen Bohrungen gesteckt.
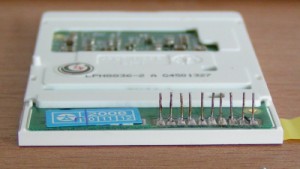
Kontaktierung des Displays
Gehäuse
Als Gehäuse wird ein ABS-Etui-Gehäuse SP 2000 SW von Strapubox verwendet. Es hat die Außenmaße 102x61x26mm und ist recht günstig, z.B. bei Reichelt, erhältlich.
Das Gehäuse hat keine Noppen im Deckel für die Befestigung der Leiterplatte. Sie wurde mit Senkkopfschrauben befestigt. Diese sind mit dem Deckel über eine Mutter verbunden, die gleichzeitig in Verbindung mit passend untergelegten U-Scheiben den richtigen Abstand zwischen Platine und Deckel (=Displayhöhe) sicherstellt.
Der Aufkleber ist spiegelverkehrt auf Tintenstrahlfolie gedruckt. Der weiße Hintergrund ist Teppichklebeband, das gleich zwei Funktionen erfüllt (Hintergrund und Klebeschicht). Tesa funktioniert hier am Besten. Bei dem im Bild oben habe ich Noppi verwendet, das ist etwas lichtdurchlässiger. Von daher sieht man auch die Löcher für die Platinenbefestigung durch (links und rechts über den Tasten). Entsprechende Distanzscheibchen über den Tasten sorgen dafür, dass diese durch die Folie hindurch bedient werden können.
Firmware
Die aktuelle Firmware unterstützt das Auslesen von drei Magnetsensoren, deren Anzeige und ein paar Möglichkeiten zur Parametrierung des Systems.
Die Drehzahl ist im Moment noch fiktiv, der Sensor ist noch in Arbeit.
|
|
|
Parametriert werden könne im Moment die Offsets für das Setzen der drei Achsen und ob es sich um eine Fräsmaschine oder Drehmaschine handelt.
Bei einer Drehmaschine werden die Werte für Y verdoppelt. Der Offset für die Achsen kann im Bereich von -999 bis 999 eingestellt werden, so dass der Nullpunkt auch beliebig ins Werkstück gelegt werden könnte.
Zusätzlich kann hier noch die Adresse eines Sensors gesetzt werden. Aber Achtung, diese Funktion darf nur verwendet werden, wenn nur ein Sensor angeschlossen ist.
Aktuell sind folgende Adressen fest vergeben:
0x00: X-Sensor
0x01: Y-Sensor
0x02: Z-Sensor
0x10: Drehzahlsensor
Die Firmware ist in C für den CCS-Compiler geschrieben. Auf CCS typische (meist eh nicht funktionierende) Sonderfunktionen wurde bewusst zum Großteil verzichtet. Damit ist auch eine Portierung für andere Compiler recht problemlos.
Anschluss
|
|
Spannungsversorgung (links) 1 - Masse RS485 Bus (Lötpads rechts) 1 - +5V |
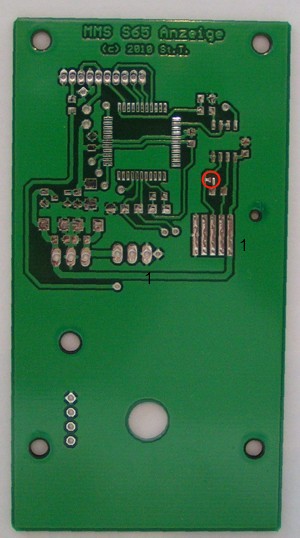
Der Jumper trennt die Anzeige von der Spannungsversorgung, für den Fall, dass der PIC neu programmiert werden soll und nur ein Programmiergerät mit 5V zur Verfügung steht.
Rot eingekreist ist die Position der Lötbrücke für den RS485 Abschlusswiderstand.
Downloads
- Schaltung und Layout (Eagle 3.55 *.zip)
- Bestückungsplan (gif *.zip)
- Firmware Beta 0.2 (*.zip)
- Aufkleber / Gehäusezeichnung (*.dxf)
!!! Achtung !!! Für die Nutzung der Daten gelten die unter Lizenz zu findenden Regeln. Mit dem Download der Dateien erkenne Sie diese an.